TAIWEIXINNUO
- online service
- custom made
- RFQ
TWXN-A53 Lancet Drone: PL 5-7kg 60-Min AI & Infrared
TWXN-A53 Lancet Drone: PL 5-7kg 60-Min AI & Infrared
Ask for a quote below.
Couldn't load pickup availability
1、Product Introduction
1.1. Product Platform



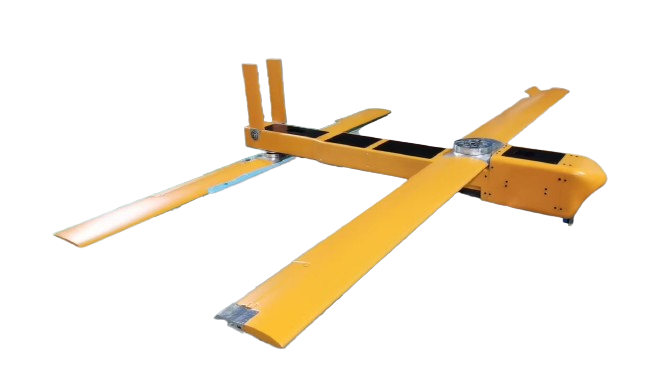
Figure 1 Product image
The TWXN-A53 (15kg class) folding wing unmanned aerial vehicle system adopts an integrated design of storage, transportation, and launch. The aircraft platform can be folded into a cylinder and launched by a cylinder type gas catapult. It is equipped with visible light/infrared dual light payload and warhead, and can strike enemy medium and large tanks, armor, or defense works. The DF-15 can be used for individual combat or vehicle mounted cluster launch to carry out saturation attacks on enemy areas.
1.2. Product Features
a. The wing can be folded into a cylinder, with an integrated design for storage, transportation, and launch, making it easy to transport. When combined with a cluster launcher, it can perform multi aircraft cluster tasks;
b. Using gas ejection method for launch, it has the characteristics of simple operation, no infrared characteristics, low noise, no danger of explosion caused by gunpowder firing, low temperature resistance and high altitude;
c. The ground station software fully considers the human-machine interaction and the control logic of the cruise missile platform, combined with the intelligent design of the flight control. Operators do not need complex training and can quickly get started using it;
d. The system adopts a modular design, which facilitates the organization of production and maintenance.
The system functions mainly include:
a. Capable of folding into a cylinder and launching in a cylindrical manner;
b. Capable of autonomous takeoff, autonomous return, autonomous route, guided flight, autonomous landing and other autonomous flight functions;
c. Equipped with manual flight assistance function;
d. Optional visible light and infrared dual light reconnaissance function;
e. Capable of real-time target locking, autonomous attack or simulated attack;
f. Capable of recording, storing, and replaying data and videos during flight
1.3. Product Parameters
|
Item |
Parameter |
Value |
|
1 |
wingspan |
1550mm |
|
2 |
Length of drone aircraft |
1350mm |
|
3 |
Folding Size |
160mm×175mm |
|
4 |
Payload |
5kg~7kg |
|
5 |
Takeoff weight |
15kg~17kg |
|
6 |
Cruise speed |
31m/s |
|
7 |
Maximum flight speed (dive) |
>60m/s |
|
8 |
Battery life |
>60min |
|
9 |
Maximum range |
70km~140km |
|
10 |
Maximum takeoff altitude |
4500m |
|
11 |
Measurement and control distance |
>30km |
|
12 |
dynamic system |
All electric drive |
|
13 |
Launch method |
Gunpowder or cold air cylinder firing |
|
14 |
Recycling method |
Not recycling/parachuting |
1.4. Weight composition of unmanned aerial vehicles
|
Item |
System |
Weight(kg) |
|
1 |
Guidance head+warhead |
5~7 |
|
2 |
Aviation electronic equipment (flight control and data link) |
0.7 |
|
3 |
Power system (battery, motor, ESC, propeller blades) |
5.93 |
|
4 |
Structural weight |
3.25 |
|
5 |
Total takeoff weight |
15~17 |
1.5. Launch tube parameters

Figure 2: Physical Launch Tube
Table 1: Launch tube parameters
|
Item |
Parameter |
Value |
|
1 |
internal diameter |
202mm |
|
2 |
Internal length |
1700mm |
|
3 |
Weight of launch tube |
6.5kg |
|
4 |
Launch method |
Pneumatic catapult |
|
5 |
Working pressure |
≥1.2 MPa |
|
6 |
Launch elevation angle |
38°≤α≤42° |
|
7 |
Whole machine weight (including launch tube) |
≤45kg(Excluding air pump) |
|
8 |
Drone bucket speed |
>28m/s |
2、Optical pod (optional equipment)
2.1. TWXN-E11 : Tactical level micro pod


Figure 3: Guidance head (optional)
The TWXN-E11 tactical level micro pod is a specialized guidance head for cruise missiles, equipped with high-definition visible light cameras and infrared cameras, which automatically achieve search and recognition functions for targets such as personnel, vehicles, and aircraft. This pod has a wide range of active viewpoints, a compact appearance, and excellent AI image recognition capabilities, making it more capable of completing sniper tasks such as electro-optical guidance, target recognition, and target tracking, and meeting the perception needs of patrol missiles for attacking targets.
2.2. Main functions of the product
a. Extremely compact structure, weighing less than 240g
b. Anti launch impact, suitable for launching and launching unmanned aerial vehicles
c. Equipped with servo image stabilization function
d. Built in tracking function
e. Wide voltage 14~28V input, dynamic power consumption control
f. All electronic devices are integrated with metal casing packaging, in compliance with EMC design specifications
2.3. Technical Parameters
|
System Description |
|||
|
System Type |
Spider Stabilization |
Weight |
≤240g |
|
System Features |
|||
|
Platform Type |
Dual Axes |
Pitch |
-150° to +150° |
|
Roll |
-90° to +30° |
Maximum Speed |
≥60°/s |
|
Maximum Angular Acceleration |
≥90°/s² |
Angular Position Accuracy |
≤0.3° |
|
Visible Image (Large Screen) |
|||
|
Resolution & Frame Rate |
1920×1080@60fps |
Field of View (Focus) |
42.28°×24.54° (7.2mm) |
|
Visible Image (Small Screen) |
|||
|
Resolution & Frame Rate |
1920×1080@60fps |
Field of View (Focus): |
12.71°×7.17° (25mm) |
|
Tracking Module |
|||
|
Frequency |
60Hz |
Tracking Speed |
±48 images/frame |
|
External Interface |
|||
|
Control Interface |
232 Port (422 Optional) |
Video Output |
Network (422 Optional) |
|
Power |
|||
|
Power Input |
14 ~ 28V |
Power Consumption |
Average ≤10W, Max ≤20W |
|
Environmental Conditions |
|||
|
Operating Temperature |
-40°C ~ +60°C |
Storage Temperature |
-50°C ~ +70°C |
|
Shock Impact |
≥400g |
|
|
Figure 4 Technical Parameters
Figure 5: Structure diagram
3、Data link

Figure 6: Air end of data link

Figure 7: Ground end of data link
TWXN-F01 is a long-distance drone data link system that continues the design and usage style of the Maestro series wireless high-definition image transmission. It has powerful functions and high integration, and can simultaneously transmit high-definition videos, data, and SBUS signals. The ground end has a 1/4 screw opening, which can be directly installed on a universal tripod for easy use. Users can connect the standard high-strength flexible cable directly to the ground station system to obtain the video and data of the drone. The integrated design on the ground side makes it very convenient for users to use.
TWXN-F01 has three optional frequency bands of 800MHz, 1.4GHz, and 2.4GHz, which users can purchase and use according to their needs (the drone used by TWXN-A53 is 1.4GHz). Please comply with local radio control regulations when using it.
The transmission distance of TWXN-F01 reaches 55km, and the integrated link makes drone operations simpler. There is no need to set up special antennas on the ground, which shortens the preparation time for operations. Good industrial thermal design enables it to meet industry level application requirements.
The control method and SDK of TWXN-F01 are compatible with the Maestro series wireless image transmission, and the interface and usage are basically the same. At the same time, it has a unified style web configuration interface, which is convenient for old users to upgrade the product.
Table 2 Data Link Parameters
|
Category |
project |
Specifications |
|
Wireless performance |
Working frequency band |
800MHz/ 1.4GHz/2.4GHz |
|
Working frequency range |
800MHz Frequency band:806MHz~825MHz 1.4GHz Frequency band:1427MHz~1447MHz 2.4GHz Frequency band:2408MHz~2488MHz |
|
|
Channel bandwidth |
5MHz/ 10MHz/20MHz (When operating with a bandwidth of 5MHz in a single frequency band, it supports 4 sets working simultaneously at a distance of 100 meters) |
|
|
modulation mode |
OFDM |
|
|
output power |
MK22:30d Bm±1d B TWXN-F01:33d Bm±1d B |
|
|
sensitivity |
≤-95d Bm |
|
|
Communication distance |
MK22:22km TWXN-F01:55km*3 |
|
|
Air speed |
30Mbps@20MHz*4 |
|
|
Power supply range |
DC 9~28V |
|
|
power consumption |
≤8.5W |
|
|
Interface |
antenna interface |
2 SMA, 1 N head |
|
power supply |
1, XTWXN-G01 , Input power supply |
|
|
Serial port |
Sky end: 2, UART1 RS232, UART2 TTL 3.3V level Ground end: 2, both UART1 and UART2 are RS232 1 start bit, 8 data bits, 1 stop bit, no parity check |
|
4、Ground station
4.1. Product Introduction

Figure 8 Product image(TWXN-G01)
TWXN-G01 is a single soldier handheld ground station that integrates an industrial grade computer system and an integrated link remote control system. Supporting three frequency integrated link transmission, with efficient unmanned system control capability, it can be widely used in remote control telemetry, safety monitoring, emergency rescue and other scenarios. The original programmable dual SBUS allows for more flexible control of the pod and gimbal. The main control computer adopts the X86 architecture I7 high-performance processor, which can meet the functional and computational requirements of any aircraft for ground stations, and also supports local recognition of video calculation. You can install LINUX or WINDOWS systems independently, and existing application software can be installed and run directly without the need for further development. The TWXN-G01 handheld ground station is the most widely used and easy-to-use portable unmanned equipment control terminal in the industry.
4.2. Product Features
a. Super powerful CPU
b. 23 physical channels
c. Route planning
d. High brightness ultra clear touch screen
e. Dual S-BUS
f. HID joystick input
g. Aircraft hoist control
h. Figure Numerical Control Integrated Link
4.3. Product Parameters
|
Item |
Parameter |
Value |
|
1 |
Whole machine weight |
2.4kg |
|
2 |
Dimensions |
364mm(L)*190mm(W)*40mm(H) |
|
3 |
display |
10.1-inch industrial touch screen, 1920 × 1200 800CCD/1280 × 800 1000CCD, clearly visible in sunlight. |
|
4 |
processor |
Intel i5 6200U |
|
5 |
Touch Pad |
10 finger capacitive touch screen |
|
6 |
operating system |
Windows 10/Linux/Kirin |
|
7 |
Memory |
8GB DDR3L |
|
8 |
mobile hard disk drive |
128GB SSD |
|
9 |
Network type |
WIFI/Bluetooth(标准)/4G(可选) |
|
10 |
External interface |
USB2.0/LAN/USB3.0×2/VGA/HDMI/Audio |
|
11 |
Physical channel |
23 in total Main joystick * 4 Button * 11 Knob * 2 Wave wheel * 2 Three level switch * 4 |
|
12 |
man-machine interface |
USB HID |
|
13 |
Remote control function |
Dual S-BUS independent output, capable of simultaneously controlling unmanned aerial vehicles and their payloads |
|
14 |
Single line bus port |
USB IN*1 SBUS OUT*2 |
|
15 |
Remote control delay |
40ms |
|
16 |
Battery capacity |
12.6V/10200mAh, external battery can also be used |
|
17 |
Battery life |
4 hours (fully charged) |
|
18 |
Charging interface |
Mini PCIE 220V to 12V power supply |
|
19 |
working temperature |
-10~+50℃ |
|
20 |
Integrated V21 |
Ground to air (omnidirectional antenna at a flight altitude of 400 meters) 15km |
|
21 |
External V31 |
Ground to air (omnidirectional antenna at a flight altitude of 400 meters) 20-80km |
|
22 |
Communication frequency |
Ground to ground 3 (omnidirectional antenna) -5km |
|
23 |
RF power |
V21 (10km level): 800MHz/1.4GHz/2.4Ghz |
|
24 |
Remote control distance |
V30 (10km level): 800MHz/1.4GHz/2.4GHz |
|
25 |
Third party communication link |
V21: 0.1-1w (adjustable) |
5、Experimental situation
For this type of unmanned aerial vehicle, static loading tests, catapult flight, tube stability flight, motor delay start project testing, parachute opening tests, maximum cruise speed flight, minimum cruise speed flight, endurance testing with different loads, ground dive strike simulation, and ground fixed and moving target locking strikes have been carried out successively.
5.1 Wing static loading test
According to the 2.5G overload standard requirement, based on a takeoff weight of 15 kilograms, the maximum force on the wing is 37.5 kilograms.


Figure 9 Static loading test
Table 4 Test Data
|
Item |
Weight(kg) |
Left wing height(cm) |
Weight(kg) |
Right wing height(cm) |
|
1 |
0 |
6.2 |
0 |
6.3 |
|
2 |
3 |
6.2 |
3 |
6.3 |
|
3 |
6 |
6.2 |
6 |
6.3 |
|
4 |
9 |
6.2 |
9 |
6.3 |
|
5 |
12 |
6.2 |
12 |
6.3 |
|
6 |
15 |
6.1 |
15 |
6.1 |
|
7 |
16.5 |
5.1 |
16.5 |
5.1 |
|
8 |
18 |
5 |
18 |
5 |
|
9 |
19.5 |
5 |
19.5 |
5 |
|
10 |
21 |
5.2 |
21 |
5.25 |
|
11 |
22.5 |
5.3 |
22.5 |
5.3 |
|
12 |
38.25 |
4.6 |
38.25 |
4.9 |
|
13 |
39 |
4.6 |
39 |
4.9 |
|
14 |
39.75 |
4.6 |
39.75 |
4.8 |
|
15 |
40.5 |
4.5 |
40.5 |
4.7 |
|
16 |
41.25 |
4.4 |
41.25 |
4.5 |
According to the data in Table 4, field test data and wing deformation, the wings with foam sandwich process meet the strength requirements
5.2 Wing folding mechanism test
According to the material of the folding mechanism and flight test requirements, this project conducted 30 consecutive ground folding tests on the folding wing, as shown in Figure 9, repeating the process 30 times.



Figure 9: Reliability Test of Folding Mechanism
After 30 repeated tests of the above process, the folding mechanism of the wing is still usable and the metal gap is small. After improvement (some aluminum parts are changed to steel parts), the reliability of the folding mechanism meets the requirements for use.
5.3 Launch tube prosthesis test
According to the minimum flight speed of the aircraft, tests were conducted on prostheses weighing up to 15 kilograms under different pressures and outlet velocities, as well as on the piston drag reduction of the launch system. The specific situation is shown in the following figure.



Figure 10 Resistance reduction test of launch cylinder piston
5.4 Flight test
In the later stage, aircraft motor start-up timing control tests, flight stability tests, maximum and minimum speed tests, endurance tests with load, and aiming and ground strike tests with guidance heads were carried out.
5.4.1 Motor start-up timing control test
The starting time of the motor launched by the aircraft from the launch tube is mainly determined by three main factors: the set time inside the flight control, the time for the electric controller to quickly start the motor from 0 to 100 after receiving instructions, and the time for the piston to detach from the aircraft.
This is an influencing factor for the same flight control system. Different flight control logics define different startup times. According to our experiments, the startup time is generally maintained between 0.14s and 0.17s. The experimental process is shown in the figure, and the entire process uses high-speed photography to obtain data.




Figure 11 Cylinder Shooting Timing Control Test
5.4.2 Maximum and minimum speed tests
Under a load of 5 kilograms, the aircraft was tested for maximum horizontal flight speed and minimum cruising speed. Based on the on-site aircraft attitude observation, the maximum horizontal flight speed test was 45m/s, the diving speed was greater than 50m/s, and the minimum cruising speed was 31m/s. If the maximum speed is to be pursued, a high-power motor can be replaced to improve the maximum level. In this experiment, the issue of endurance time was considered, and a motor with relatively low power consumption was selected.
In addition, during the testing process of this content, the parachute landing method was used, and multiple repeated tests were conducted on the parachute opening. Through 20 landing tests, only one was attached to the propeller, and the others were successfully parachuted. For this type of aircraft, the success rate of parachute opening can meet the requirements.

Figure 12 Maximum and minimum speed tests












Figure 13 Landing Test
5.4.3 Battery life test
This endurance test mainly targets 5kg and 7kg loads, using a 12S, 22000mAh semi-solid battery. The test results are shown in the table.
Table 1 Battery Life Test Results
|
Item |
Takeoff weight |
Battery capacity |
Cruise speed |
Payload |
Endurance time |
|
Actual measurement value |
|||||
|
1 |
15.08 |
12S,22000mah,3.85kg |
31m/s |
5kg |
78min |
|
2 |
17.76 |
12S,22000mah,3.85kg |
35m/s |
7kg |
40min |
|
Estimated value |
|||||
|
1 |
15.08 |
12S,27000mah,4kg |
32m/s |
5kg |
>90min |
|
2 |
17.76 |
12S,27000mah,4kg |
36m/s |
7kg |
>50min |


Figure 14 Weighing before takeoff

Figure 15 Test of endurance time with a load of 5 kilograms (time in the upper left corner)
Figure 16 Test of endurance time with a load capacity of 7 kilograms (time in the upper left corner)
5.4.4 Wind resistance test
The outdoor flight requirement of this product is to meet the wind speed requirement of level 6 or above, which means that the wind speed during aerial flight should be between 10-14m/s. Based on this requirement, a test flight was conducted under this condition. The ground wind speed is 8m/s, and the air wind speed is above 10m/s, as shown in the following figure.
Figure: Test flight conditions: load 7kg, ground wind speed 8m/s


Figure 18: The difference between airspeed (measured by airspeed tube) and ground speed (GPS speed) is the air wind speed
The minimum wind speed difference displayed by the ground station is about 10m/s, and other speeds are shown in the data recorded by the flight control: the minimum difference is 5m/s (crosswind), and the maximum difference is 13m/s (upwind flight). It can be concluded that under this flight condition, the air wind speed is between 10-13m/s. Satisfy the requirement of level 6 wind.

Figure 19 Fluctuations in airspeed and ground speed during circular flight (the difference is the air wind speed)
5.4.5 Guidance head locking and fixed target strike test
Fixed target strike and moving target locking experiments were conducted for visible optical guidance heads. The specific situation is as follows.

Figure 20 Diving process


Figure 21 Fixed target strike


Figure 22 Aiming Test and Strike Test with Guidance Head
Contact form